01
多様なモノを掴める、「汎用性」
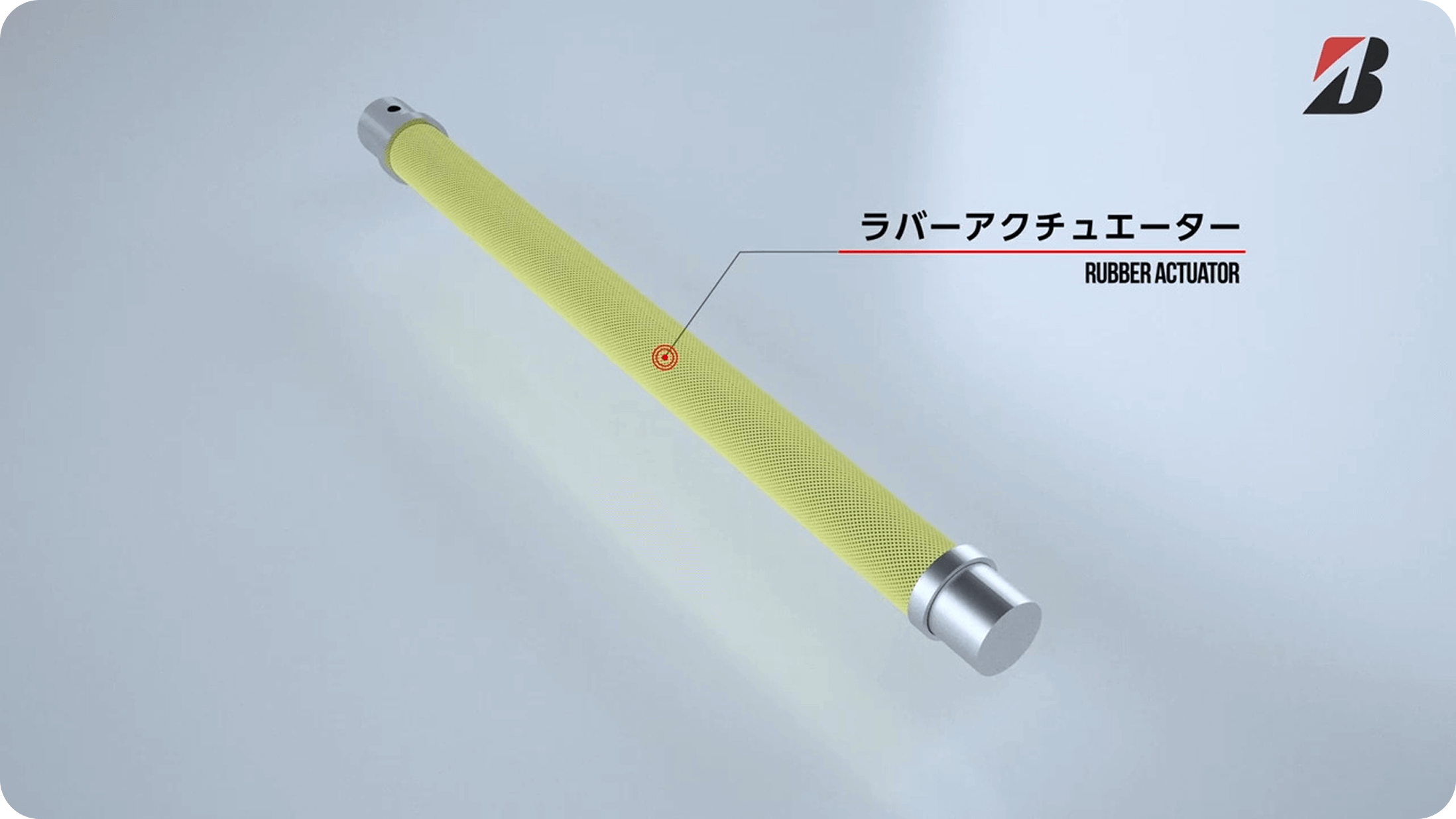
ゴム人工筋肉の柔らかさが、部品や日用品など、
多様なモノになじむことで「つかむ」を実現します。

様々な形状・サイズのワークを
ひとつのハンドで扱えます
製造・物流の現場では、ワークの形状・サイズが変わるたびに
ロボットハンドを替えないと対応できませんでした。
デリケートなワークを扱う作業は特に自動化難易度が高く、
多くの人手がかけられています。
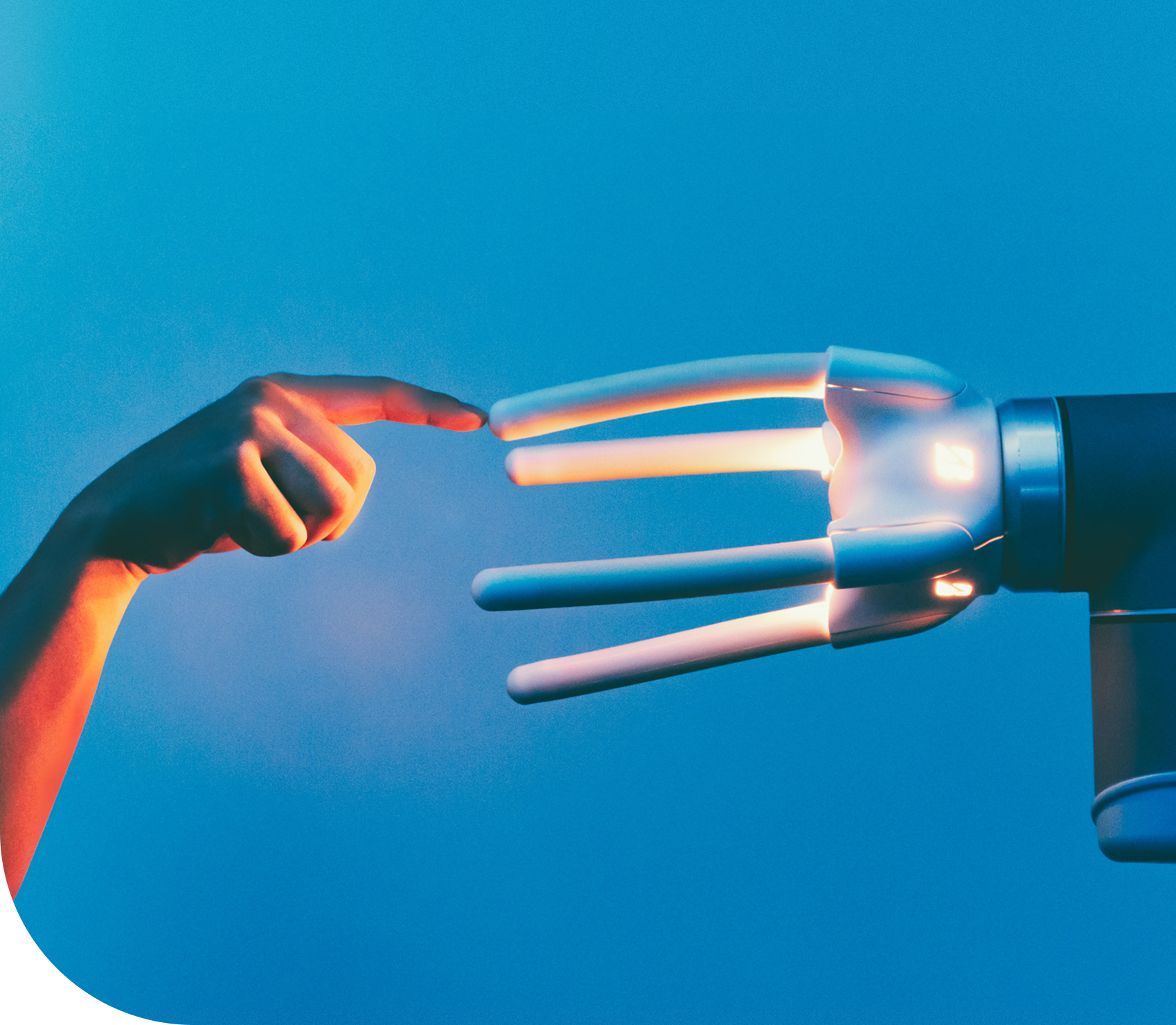
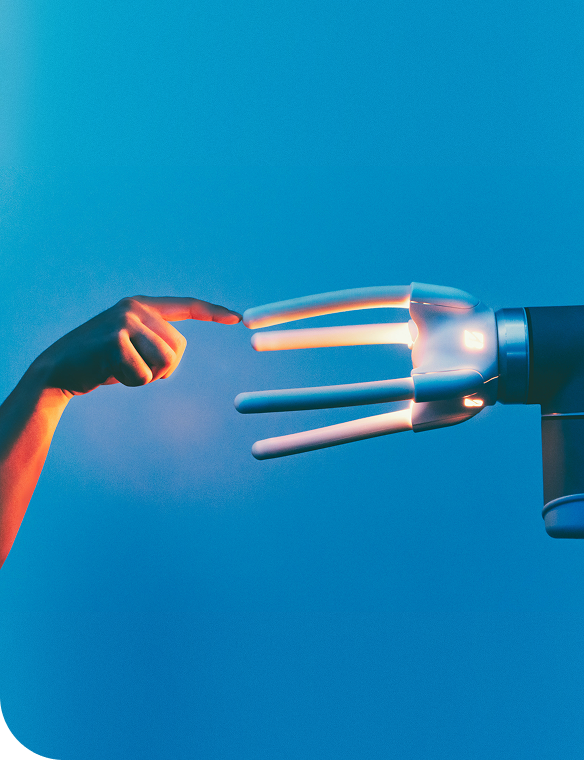
また、人と協働するロボットアームが増える一方、
対応しているハンドがなくリスクアセスメントの面で
活用にハードルがありました。
ブリヂストンは100年近いゴム技術を活かし、
これら3つの課題をひとつのハンドで解決するTETOTEを開発しました。
01
ゴム人工筋肉の柔らかさが、部品や日用品など、
多様なモノになじむことで「つかむ」を実現します。
02
いい感じの力加減でモノになじむことで、傷つけない、
繊細な「つかむ」を実現します。

03
人とロボットが協働する世界。モノにも人にも優しい、
柔軟なTETOTEだからこそ、横で作業していても、触れても安心な存在になります。